用MATLAB实现激光雷达的三维点云的重建。
”点云三维重建 三维重建 激光雷达 激光雷达点云 三维点云重建“ 的搜索结果
用MATLAB实现激光雷达的三维点云的重建。
本文主要描述了基于激光雷达的点云数据的滤波分类 及其三维重建
(1)点云数据的获取 3D信息采集常使用移动测绘系统(Mobile Mapping System)...根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。 车载装置上装有雷达和GPS/IMU...
通过结合地基激光雷达点云与无人机影像视觉点云,可以解决模型重建过程中激光与视觉点云的配准和融合以及模型构建与修补等关键问题,从而获得目标对象的三维模型。在此基础上,进一步提出的模型应用成果场景漫游动画...
三维重建是指对三维物体建立适合计算机表示和处理的数学模型,是在计算机环境下对其进行处理、操作和分析其性质的基础,也是在计算机中建立表达客观世界的虚拟现实的关键技术。
针对室内场景的三维重建问题,采用激光测距的方法并结合传感器及电机控制等技术设计了三维重建系统。该系统以树莓派卡片电脑为控制核心,以四轮模型小车为移动平台,搭载了RPLIAR A2激光雷达、MPU-6050惯性元件、...

三维激光雷达广泛应用在智能车系统中,点云目标分割是智能车环境感知中的关键技术。针对目前三维激光雷达点云目标分割算法实时性和准确性不高的问题,提出一种基于深度图的点云目标快速分割方法。将点云数据表示为深度...
针对无人车三维激光雷达与全球定位系统/惯性导航系统组合导航系统安装位置关系难以准确测量及相对转角无法直接测量的问题, 提出一种基于多对点云同时匹配迭代生成外参数的方法。首先选择车辆直线往返行驶中位置相近...
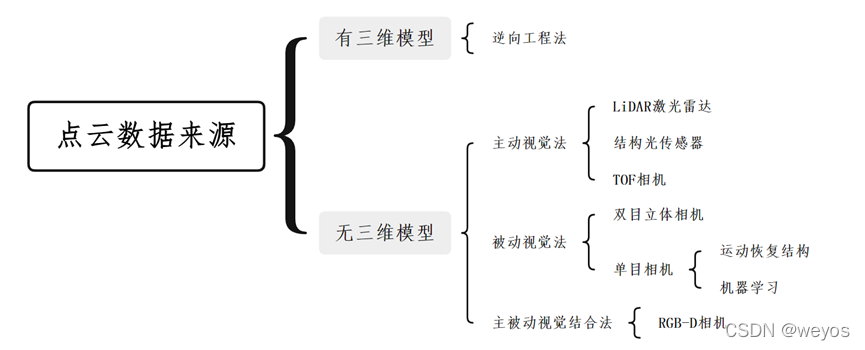
根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。 车载装置上装有雷达和GPS/IMU,雷达可以获取车载装置到扫描点的距离与偏角,这样就可以得到扫描点在GPS坐标系...
要进行三维重建,你需要先获取激光雷达采集的点云数据。然后,使用Python中的一些库来处理这些数据,例如numpy、matplotlib和open3d等。 以下是一个简单的基于Python的激光点云三维重建的示例: 1. 加载点云数据 ...
本文所设计的点云处理及三维重建软件主要基于Microsoft Visual Studio 2017以及Qt Creator两个集成开发环境,来完成代码的编写、分析、编译以及调试工作。此外,本文主要基于Qt框架来完成软件界面的设计以及内部逻辑...
根据语义或实例分割的结果可视化KITTI数据集点云,为不同类别或不同的实例赋予不同的颜色,适合论文作图

目前的主流三维重建算法包括:基于网络的纯视觉三维重建、基于SLAM算法的三维重建基于激光视觉SLAM(Simultaneous Localization and Mapping)的三维重建在多个方面具有许多优势,这些优势使其在许多领域如机器人...

为了高效提取激光雷达点云数据的局部几何结构特征,实现三维(3D)目标的配准、检测和识别,提出了一种基于分层墨卡托投影(HMec)的局部点云特征描述子。首先,采用传统方法进行特征提取;然后,利用具有保角特性的墨卡托...
通过激光雷达获得的散乱点云,通常无法直接应用于实际工作....文中方法通过建立三维点云的索引关系,减少了交互中的计算量,提高了点云交互的效率,适用于大数据量三维点云的处理,可应用于地形测绘、电力勘察设计等领域.

其中深度学习是二维图像目标检测及分类的重要方法,在介绍三维激光雷达点云特点的同时分析了点云深度学习的挑战,最后详细分析了三维点云深度学习在障碍物检测方面的研究现状以及发展趋势,并且介绍了自动驾驶领域的...
目录激光雷达点云的研究激光雷达数据的处理方法分类 激光雷达点云的研究 目前,学术界和业界对于激光雷达点云的处理方式的研究变的非常热门。我认为原因有二: 来自学术界的推力:对于图片中的许多问题有了突破...
基于LMS511激光雷达三维点云可视化python源码+点云数据+演示视频+使用说明.zip 基于LMS511激光雷达三维点云可视化python源码+点云数据+演示视频+使用说明.zip 基于LMS511激光雷达三维点云可视化python源码+点云数据+...
目录00 引言01 点云特征提取与匹配1.1 传统点云特征提取1.2 点云深度学习1.3 点云卷积1.4 稀疏卷积1.5 点云Transformer1.6 点云旋转不变特征提取1.7 点云匹配02 场景点云语义分割2.1 场景表征与数据集2.1.1 室内场景...
机载激光雷达点云数据处理之后的三维重建研究问题一直以来都是研究的重点。针对堆料点云数据三维重建中贪婪三角化算法的不足,提出一种基于距离反比插值的贪婪三角化算法。该算法通过插值不仅能得到未测量区域数据,...
基于LMS511激光雷达三维点云可视化python源码+点云数据+演示视频.zip 激光雷达旋转扫描与三维显示 内容包含: 主程序 窗口测试 点云数据 演示视频 使用说明:见使用说明 开发说明: 见点云三维建模 需要设备:LMS...
激光点云栅格化处理 激光点云地图存储的是传感器对... 激光点云栅格化核心思想是将激光雷达所扫描到的区域用网格进行处理,每个栅格点云代表空间的一小块区域,内含一部分点云,点云栅格化处理分为二维栅格化...
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地